This project explores how magnetic fields can be used to control the motion
of magnetized particles for magnetic drug delivery, where therapeutic
particles are directed toward sites of disease.
Problem
Magnetic fields cannot create stable equilibrium points in free space to
trap magnetized particles. Magnetized spherical particles, which are commonly
used as therapeutic carriers, align with the applied field and move toward
its source, making precise positioning infeasible. In contrast, anisotropic
magnetic nanorods exhibit transient rotational dynamics that can be used to push
the particles away from the source.
Model and Control Strategy
I developed a physics-based dynamic model describing the rotational and
translational motion of magnetic nanorods under external magnetic fields.
The model captures transient rotational dynamics caused by particle
anisotropy and demonstrates how magnetic targeting can be achieved in the
absence of a stable equilibrium point.
A uniform magnetic field aligned the nanorods along a fixed direction, after
which a second pulse applied in the opposite direction pushed the particles
away from the field source. Repeating this actuation periodically in four
directions produced net average motion toward a target point.
This control strategy builds on prior experimental work, with the pulse sequence
modified to use sinusoidal fields to better reflect realistic experimental
constraints.
Simulation
The system dynamics were simulated in MATLAB to study transient behavior
and stability over a single actuation period. The simulations were also
used to study the average behavior of the particle, confirming that the
control sequence produces an average net displacement toward the target.
These results guided parameter selection and experimental testing.
Experimental Validation
The model and control approach were validated through laboratory experiments
using LabVIEW and the Arduino IDE. The observed transient dynamics matched those
predicted by the model.
This work is currently under review for the American Control Conference (ACC).
Tools / domains: Electromagnetics, dynamic modeling, control systems,
MATLAB simulation, LabVIEW, Arduino, experimental validation, 3D printing
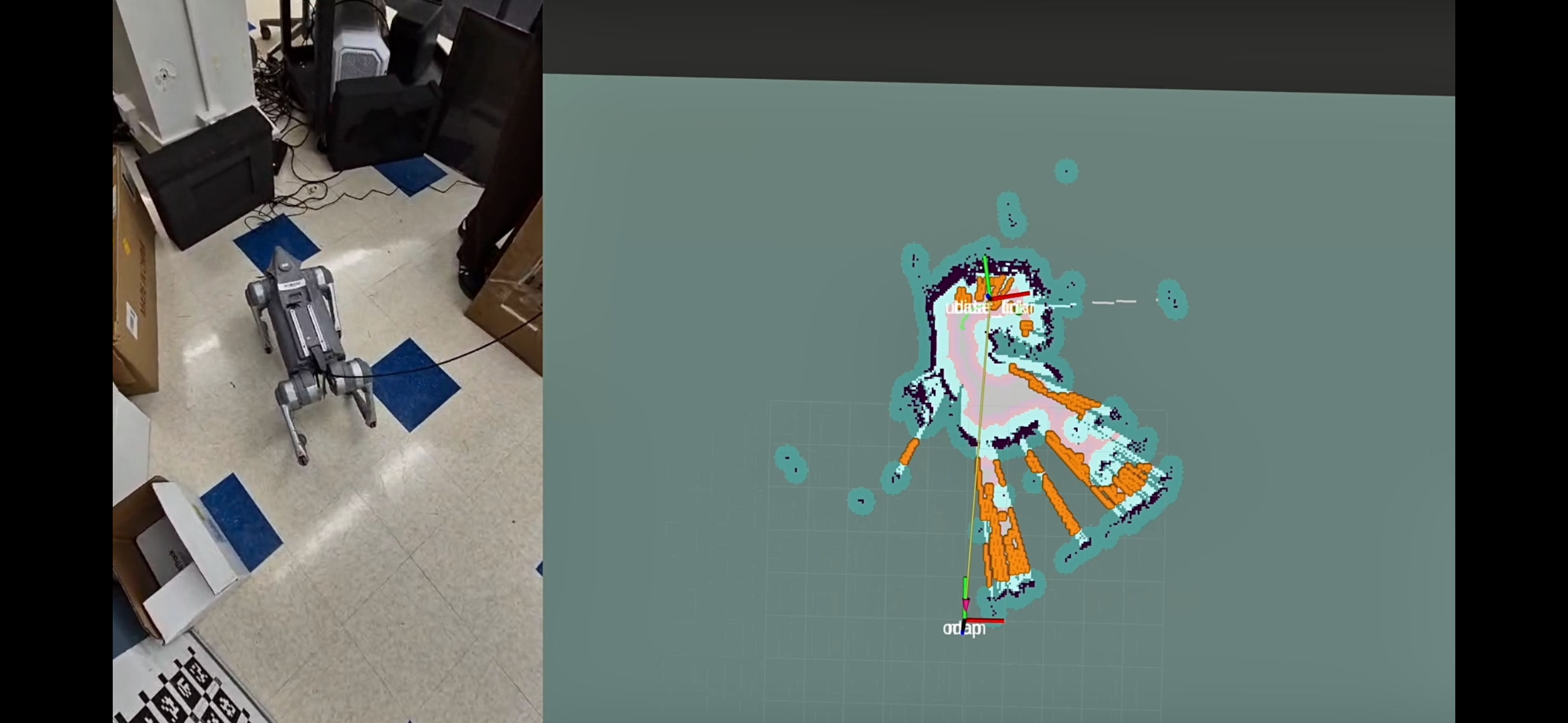
Quadruped Autonomy and Navigation (Unitree Go2)
Team robotics project
This project focused on deploying an autonomous navigation and exploration
stack on the Unitree Go2 quadruped for search-and-rescue-style tasks in
indoor environments. The system integrated perception, mapping, and
planning to enable reliable autonomous operation on hardware.
My contributions included developing frontier-based exploration logic,
setting up Ethernet networking for reliable on-robot connectivity, and
launching and managing onboard processes during experimental trials.
A detailed project description, including system architecture, videos,
and experimental results, is available on the team project website:
Go2 Search and Rescue Project
Tools / domains: ROS 2, Nav2 costmaps and occupancy grids,
frontier-based exploration, system integration and debugging,
real-time deployment on quadruped hardware (Unitree Go2)
Real-Time Power System Simulation (OPAL-RT)
Laboratory training and infrastructure support
I worked with an OPAL-RT real-time simulator set up in the lab, running
power system models in real time and supporting their use in experiments by
other researchers.
To improve usability within the lab, I wrote documentation for future
researchers, covering model deployment for working with the simulator.
Tools / domains: OPAL-RT, Simulink, real-time simulation,
hardware-in-the-loop workflows, power systems
Distributed Lighting Control (Personal Project)
Independent hardware/software project
As a personal project, I implemented a standalone lighting control system using a
Raspberry Pi 4 running Falcon Player (FPP), integrating WOW Lights singing
trees and Light-O-Rama-controlled trees and arches. The system was isolated
onto dedicated hardware and configured through FPP’s access-point GUI for
reliable, standalone operation.
The project required debugging timing, networking, and configuration issues
to ensure consistent operation during extended real-world use.
Tools / domains: Raspberry Pi, Falcon Player (FPP), embedded Linux,
networking, system configuration, Light-O-Rama, WOW Lights
Industry Experience
Semiconductor Device Fabrication and Process Engineering
Electrical Engineering Intern, KBR / Air Force Research Laboratory (AFRL)
I worked in a semiconductor cleanroom environment fabricating and testing
MOSFET devices using lithographic and microfabrication processes.
My responsibilities included spin-coating, photolithography, wet etching,
and annealing, along with device characterization using a scanning electron
microscope (SEM) and four-point probe measurements.
I also conducted process optimization experiments, studying the effect of
materials and annealing temperature on contact resistance and breakdown
behavior, and helped train other lab members on precision alignment
techniques for a Heidelberg laser writer.
Tools / domains: semiconductor fabrication, photolithography,
cleanroom processes, MOSFET characterization, SEM imaging,
four-point probe testing, process optimization
I worked as a manufacturing engineering intern supporting production lines
for rain-light sensors and fuel-pump control modules in an automotive
electronics facility.
My work included conducting run-at-rate studies for new equipment,
analyzing production throughput, and preparing daily and monthly reports
on manufacturing performance.
I also led asset verification across multiple production lines and
supported continuous-improvement efforts for factory-floor operations.
Tools / domains: manufacturing systems, production analytics,
industrial electronics, factory operations, process improvement